
编辑|南柯归洵
前言在机床的加工操作中,相对运动一般分为初级运动也就是切削速度,以及次运动中的进给速度。
机床的这些运动导致刀具和工件之间的相对运动,通过这些运动,可以产生所需的零件形状和表面纹理。

因此刀具中心点(TCP)的位移,本质上是加工过程中刀具与工件之间的相对运动,加工性能取决于沿刀具路径的TCP位移。
对于机床加工来说,叶片铣削工艺的改进难度有多大?是否能用二维轮廓测量系统来改进?

在最近一项关于叶片铣削的研究中,有学者提出了四个主题来讨论,铣削工艺规划、涡轮叶片的铣削力、加工误差以及振动和表面质量,在振动和表面质量方面,其中一个问题是由TCP位置偏差引起的。
因此TCP动态行为对振动和表面质量具有显著影响,为了测量机床TCP位移处刀具路径的轮廓,常用的测量仪器有两种:接触式和非接触式。

接触式测量设备是双球杆(DBB),但是DBB仅测量圆形路径的轮廓,并且圆形路径的半径仅限于仪器规格,DBB不能执行高进给运动。
而跨网格编码器(KGM)则可以执行非接触式光学测量,KGM的优点是分辨率高,进给运动高,测量范围宽,更重要的是它可以测量任意路径中的轮廓。
然而KGM难以安装,体积大且价格昂贵,其探测器和刻度板之间的间隙仅为1毫米,安装过程中容易发生损坏,导致维护成本高。
因此有学者能够进行非接触式光学测量的TCP位移测量设备,蓝光拾取头和位置敏感探测器(PSD)以高进给运动执行轮廓测量,TCP位移光学测量系统(TCP-OMS)具有二维任意路径测量、结构紧凑、安装简单、成本低等特点。

为了估计机床在高进给运动下的TCP动态行为,许多学者的目标是在DBB和KGM等传统测量仪器之外开发新型TCP测量设备。
一位国内的学者决定采用DBB,通过五轴机床中的旋转刀具中心点(RTCP)功能,来测量K1路径的轮廓误差。

同时还有一批学者开发了一种类似于DBB的TCP测量仪器,在该测量仪器中,棒的两端都设有球,棒一端的球安装在主轴的刀架上,而棒另一端的滚珠与旋转编码器组合并安装在工作台上,该杆配有线性传感器,TCP位移测量基于线性位移和旋转角度。
两位日本的学者提出了一种,由旋转编码器和链接机构组成的TCP测量仪器,称为旋转编码器和链接机构(RELM),主轴和工作台的相对位置由三个旋转编码器和给定的连杆机构进行分析。

还有一些学者通过带探头的线性测量仪器,进行TCP的位移测量,主轴的刀架夹紧陶瓷球,线性测量仪器安装在工作台上,为了同时测量TCP三个方向上的位移。
同时有两位研究员分别使用了三个和四个线性测量仪器进行测量,线性测量仪器的安装方向与机床的笛卡尔坐标不同,收集实测数据是为了通过坐标变换得到TCP的三个轴向位移。

但是这些研究中提出的TCP测量系统属于接触型,不能执行高进给运动,为了提高加工精度,一些研究利用非接触式测量仪器来获得TCP在高进给运动下的动态行为。
为此有学者提出了机床的机电一体化模型,其中KGM用于二维轮廓测量,以验证其在高进给运动下的机电一体化模型。

一些学者提出了用于TCP位移测量的加速度计,加速度计同时测量三个轴信号,这种加速度计体积小,易于安装在机床上。
但是加速度计的测量数据是加速度信号,必须进行两次积分才能获得位置信号,此过程会导致测量过程中噪声放大,并且位置信号精度低。
所以加速度计可以应用于TCP响应测量,但不适用于高进给运动下的轮廓测量。
一些学者提出了通过激光干涉仪进行圆形测试的TCP位移测量,根据光学干涉原理测量TCP的X轴和Y轴位。
在此基础上有人在主轴上安装了一个激光头,在工作台上安装了PSD,当PSD接收到激光时,获得TCP位移,PSD信号的分辨率为16.1μ米。

有学者使用表面编码器,来测量双轴位置,其原理是p偏振激光作为光源穿透偏振分束器和四分之一波板(λ/4板),它到达网格表面并被反射,偏振分束器通过透镜将其反射到四象限光电传感器上,然后就可以得到想要的位置了。
之后有人开发了一种由2D角度网格,以及两个2D斜率传感器组成的测量系统,并称为双模表面编码器。

之后有一些学者研究了一种使用视觉图像的TCP测量系统,首先使用一个小长方体作为测量窗口,并使用2D矩阵记录目标点的颜色和像素值。
随后选择目标对象的中心点,并确定目标点在2D坐标中的位置,然后就使用测量窗口扫描目标的运动,以找到X轴和Y轴的最小值和最大值。
X轴的最大值表示为2,Y轴的最大值表示为1,X轴的最小值表示为4,Y轴的最小值表示为3,这样做的目的是找到目标中心点,当目标移动时,将再次查找并存储目标中心点。

然而有人研究发现,他们能够从基于蓝光拾音头的四象限传感器上,形成的圆形光斑中识别出该位置。
于是就有人采用激光二极管来产生椭圆形激光,这是因为激光二极管被激发时的垂直偏差角大于水平偏差角,两个圆柱透镜被视为水平扩束镜,将椭圆光转换为对称圆形光,光线通过准直透镜。
然后光线通过水平扩束镜转换为平行光,它通过物镜聚焦在测试平面上,并反射到原始路径上,它被分束器反射并穿过柱面透镜,散光在到达传感器之前产生。

之后我们发现,在位置测量过程中,PSD离中心越远,测量结果与实际和测量位置之间的误差就越大。
于是就在此基础上提出了一种补偿方法来解决错误,电流信号转换为电压信号,电压信号由运算放大器滤波放大,然后将模拟信号转换为数字信号,导入单片机计算实际位置。

一些研究介绍了基于光学传感器和光学原理的新方法,然而这些研究侧重于平面度误差和工件表面纹理。
我们提出了一种执行非接触式光学测量的TCP轮廓测量系统,称为TCP-OMS,该光学测量系统独创,结构紧凑,安装过程简化,成本低,并且在实际加工操作之前,还可以通过TCP-OMS评估TCP轮廓性能。

首先介绍了蓝光拾音头、PSD和信号处理的基本原理,然后对TCP-OMS的光强度、PSD信号校正、系统分辨率和线性度进行了验证。
最后之后将TCP-OMS安装在实际机床上,以验证TCP二维轮廓测量的性能,轮廓测量执行具有不同进给运动的圆形路径,最终结果表明TCP-OMS与KGM具有相似的运动趋势。
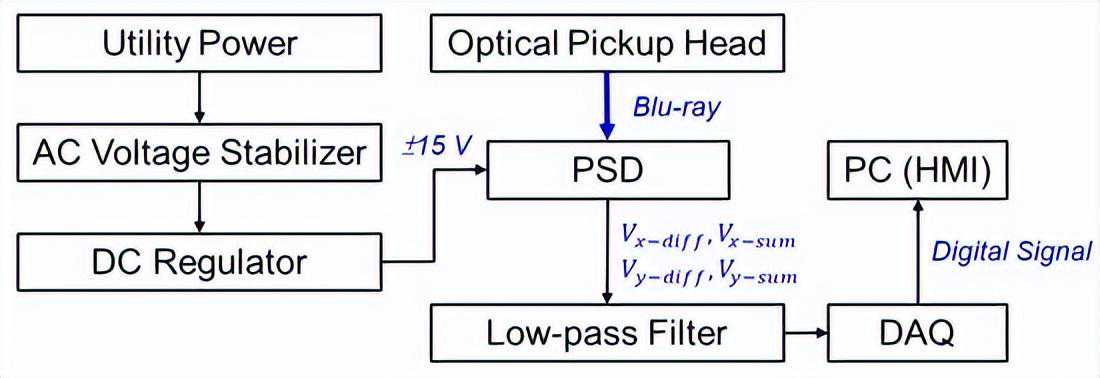
在我们提出的TCP-OMS架构中,电源在交流稳压器和直流稳压器之后提供给PSD,光斑通过蓝光拾音头聚焦到PSD上,PSD根据光斑位置产生与输出信号对应的电压。
低通滤波器用高频噪声滤除输出信号,模拟信号通过数据采集(DAQ)转换为数字信号,使用个人计算机(PC)上的软件设计了人机界面(HMI),并以此来观察运动轨迹的状况。

本研究中TCP-OMS的体系结构,
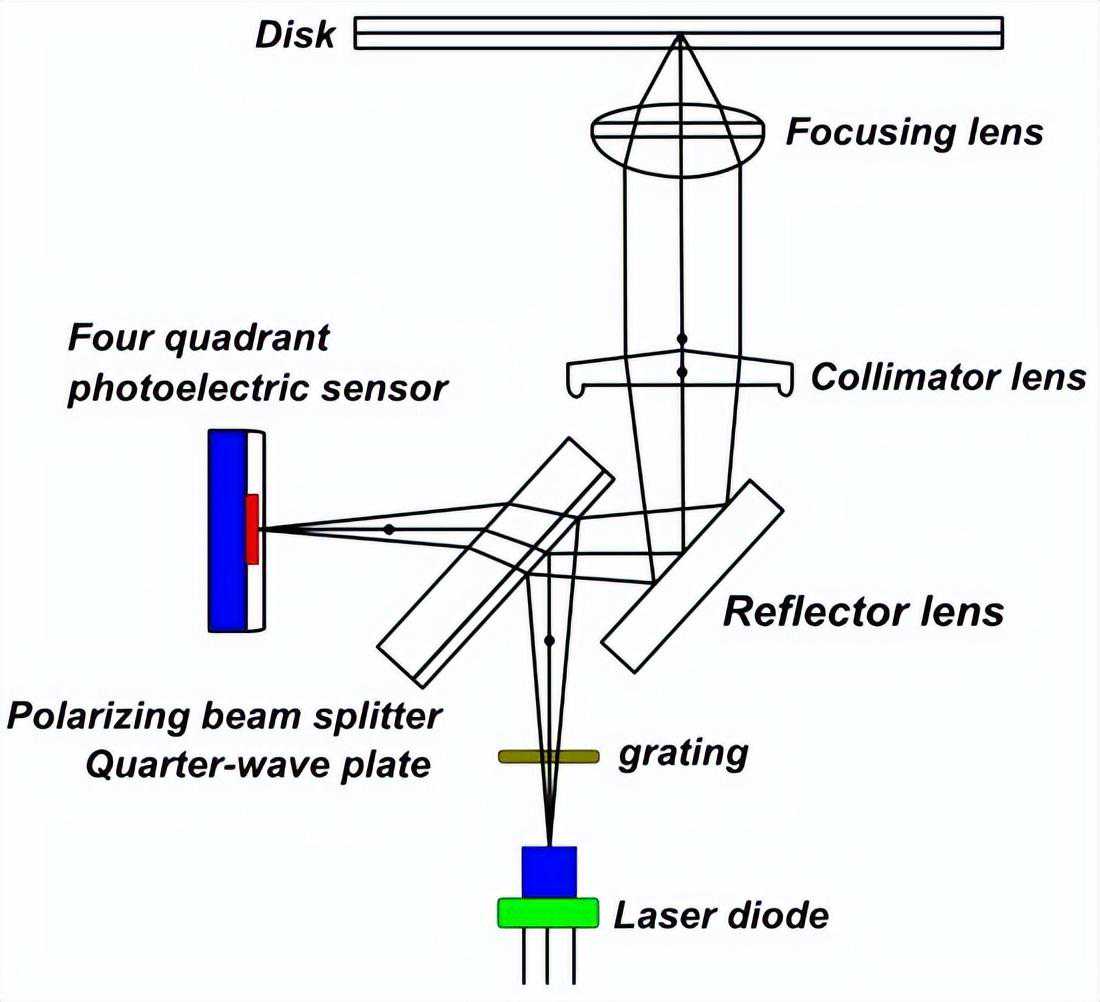
蓝光拾音头光学拾取头包括激光二极管、光栅、偏振分束器、反射透镜、λ/4板、准直透镜、聚焦透镜和四象限光电传感器。
光学拾音头的光路原理很简单,激光二极管的发射光束穿过光栅,灯分为0阶和±1阶灯,光进入偏振分束器后,反射p偏振光,光线通过λ/4板时变为圆偏振光,反射透镜改变光向,聚焦透镜将光线聚焦在光盘上形成小光斑。

之后0阶光用于确定光斑是否聚焦在光盘上,一阶光用于验证光盘读取的数据,记录了光盘上小光点的陨石坑反射,反射光沿着原始光路返回并穿过λ/1板,它被改为S偏振光,穿透偏振分束器,光线进入散光镜片。
在这个过程中,四象限传感器将会光信号从光学系统传输到光电检测设备,然后将光信号转换为电子信号作为可读数据,根据光拾音头的光路原理TCP-OMS采用PSD代替光盘。
PSD作为工件安装在机床的工作台上,光学拾取头作为切削工具安装在机床的主轴上,光学拾音头的激光被传输到PSD,PSD上的光斑是TCP位置,因此当机床进行刀具路径运动时,TCP-OMS可以用来测量TCP的运动轨迹。

在这当中有两个阶段用于纠正TCP-OMS,在第一阶段,蓝光拾音头的光强控制测试感测了PSD,然而PSD采集的特点是单位面积允许的最大光强度,并且光强度与光功率成正比。
因此该测试确定了在测量PSD期间蓝光拾音头的最佳控制条件,激光二极管驱动器为蓝光拾音头提供电流,激光功率计测量蓝光拾音头的光功率,以获得电流和光功率之间的线性关系。

最后研究发现,当蓝光拾音头的电流为35-65mA时,光功率与电流成正比,当蓝光拾音头和PSD之间的间距为1.5时毫米,PSD的光强限制为2毫瓦蓝光拾音头所需的电流为50马。
因此比例常数计算出PSD的位置电压和光功率,根据提供的设置条件TCP-OMS的值为5毫米/V。

我们还在这当中提出了一种在工具中心点(TCP)的二维轮廓测量系统,该系统由蓝光拾音头和位置敏感探测器(PSD)组成,TCP位移相当于刀具和工件之间的相对位置。
当机床沿所需轮廓操作机床零件时,TCP就会进行位移来影响加工几何精度。

为了评估TCP位移,在实践中通过跨网格编码器(KGM)测量轮廓误差,但是KGM体积大且价格昂贵,因此很难安装。
所以本研究构建了一种光学测量系统(OMS)来测量TCP位移,并将其称为TCP-OMS,蓝光拾音头作为工具安装在主轴上,PSD作为工件安装在工作台上。

为了提高TCP-OMS测量信号的分辨率和精度,通过交流稳压器、直流稳压器和低通滤波器降低了噪声。
实验结果表明,位移测量分辨率小于2μ米,X方向和Y方向的线性区域为±3mm。

在实际机床上对圆形路径进行了运动测试,并验证了该测量系统的重复性测试,采用TCP-OMS和KGM收集圆形路径的测量数据,并在之后进行比较。
当圆形路径的进给速率增加时,圆形偏差同时被放大,在圆形路径的象限处观察到轴反转尖峰,TCP-OMS的这些测量结果与KGM的测量结果相匹配。

我们这次开发的TCP-OMS具有安装简单、紧凑、价格低廉等特点,适用于机床刀具中心点的二维轮廓测量。
在加工操作中,机床可以根据切削刀具和工件的相对运动产生所需形状的零件。

同时为了在实际加工前评估TCP的运动轮廓性能,我们还研究了一种TCP光学测量系统,TCP-OMS的分辨率为1μ米,并且该系统在线性范围内的线性度低于1.6%。
同时我们还进行了圆形试验进行验证,观察到轮廓误差和轴向反转尖峰,与KGM一样,TCP-OMS执行非接触式测量,尽管TCP-OMS的灵敏度不如KGM高。

但是TCP-OMS采用蓝光拾音头和PSD,具有紧凑、易于安装在机器上、减少校准时间和价格低廉的优点。
并且TCP-OMS的紧凑结构适用于测量动态TCP行为,TCP-OMS表现出几个值得进一步发展的有利功能。
首先是未来的研究将侧重于优化测量灵敏度,其次具有更高响应性的PSD,将更加有利地降低非线性并提高灵敏度。
由于TCP-OMS的电源和信号传输有望采用无线系统,因此降低信号噪声将是有用的,所以进一步改进的潜力,将会使该测量系统适用于未来的实际应用。


